- To Share:

- |


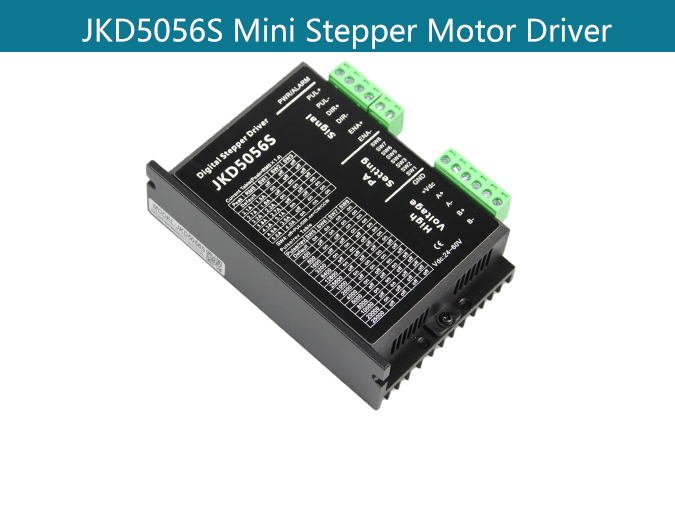


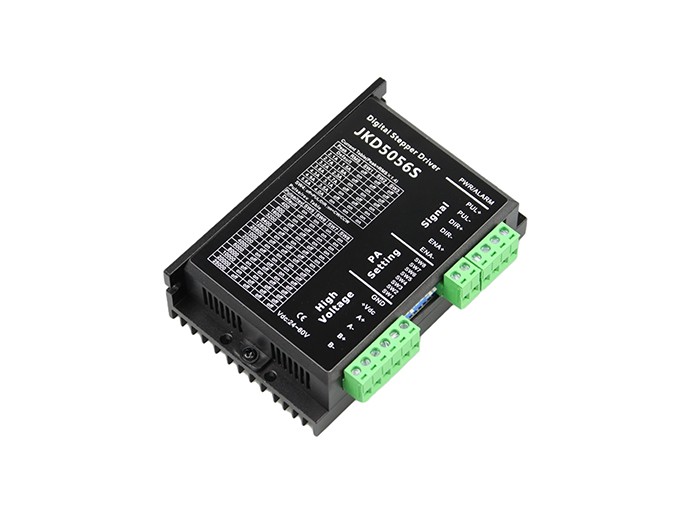


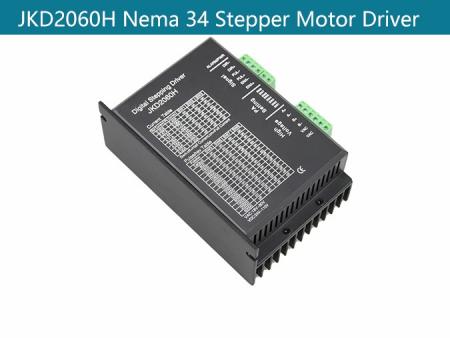
JKD5056S Nema 23 24 34 Short Body 2-phase Stepper Motor Driver
Product Description:
Main features:
Product Type: Nema 23 Stepper Motor / Nema 24 Stepper Motor / Nema 34 Stepper Motor Driver
Feature summary:High start speed; High hording torque under high speed; High performance, low price
Place of Origin:china
Minimum order quantity:10pcs
Support Motor: Nema 23 Stepper Motor / Nema 24 Stepper Motor / Nema 34 Stepper Motor
Packing:The sample is packed in carton,the batch with plastic pallet
Delivery time:Standard product: 7-10days
Customized product: 25-30days
Transaction mode:EXW, FOB, FCA, CIF, FAS, CFR, CPT, CIP, DAF, DEQ, DDU, DDP...
Product Overview:
JKD5056S is a new digital stepper motor driver by JKONGMOTOR. It adopts the latest 32-bit DSP digital processing technology. The drive control algorithm adopts advanced variable current technology and advanced frequency conversion technology. The driver has small heating, small motor vibration and stable operation. Users can set any subdivision within 200 ~ 51200 and any current value in the rated current to meet the application needs in most occasions. Thanks to the built-in micro-subdivision technology, the subdivision effect can be achieved even under the condition of low subdivision. The operation is smooth and the noise is ultra-small under low, medium and high speed. The driver integrates the parameter auto-adjust function, which can automatically generate optimal operating parameters for different motors to maximize the performance of the motor.
Features:
●New 32-bit DSP technology
●Ultra-low vibration noise
●Built-in high subdivision
●Automatic parameter adjustment function when power on
●Variable current control reduces the heating of the motor
●The current automatically halve at rest
●New 32-bit DSP technology
●Ultra-low vibration noise
●Built-in high subdivision
●Automatic parameter adjustment function when power on
●Variable current control reduces the heating of the motor
●The current automatically halve at rest
Application:
Suitable for all kinds of small and medium sized automation equipment and instruments, such as: engraving machine, marking machine, cutting machine, laser lighting, plotter, cnc machine, automatic assembly equipment, etc. It use very well in the equipment that user expects small noise, and high peed
Electrical indicators:
Instruction | JKD5056S | |||
Minimum | Typical | Maximum | Unit | |
The output current | 0.1 | - | 5.0 | A |
Input voltage | 24 | 36 | 50 | VDC |
Control signal input current | 6 | 10 | 16 | mA |
Control signal interface level | 4.5 | 5 | 28 | Vdc |
Input signal minimum pulse width | 1.5 | - | - | us |
Stepper pulse frequency | 0 | - | 200 | KHz |
Insulation resistance | 100 | MΩ | ||
Using environment and parameters:
Cooling method | Natural cooling or forced air cooling | |
Using environment | occasion | Can not be placed next to other heating equipment, should avoid dust, oil mist, corrosive gas, too big humidity and strong vibration place, prohibit to have combustible gas and conductive dust |
temperature | -5℃ ~ +50℃ | |
humidity | 40 ~ 90%RH | |
vibration | 5.9m/s2MAX | |
Storage temperature | -20℃~80℃ | |
Using altitude | Below 1000 metres | |
Weight | About 280 g | |
Enhanced heat dissipation:
1)Driver's reliable working temperature control in 60 ℃, the motor's working temperature control in 80 ℃
2)We suggest automatic half stream mode,when the motor is stopped and the current is reduced by half to reduce the heating of the motor and actuator
3)When installing the driver, use vertical side installation to make the cooling tooth form a stronger air convection. The fan shall be installed near the actuator in the time necessary to heat the heat and ensure that the driver works in the range of reliable working temperature.
Control signal interface circuit:
Name | Function |
PUL+ | Pulse signal: pulse rising edge is effective; In PUL high level,voltage is 4.5 ~ 28Vdc, and the low level, voltage is 0 ~ 0.5v. In order to reliably respond to the pulse signal, the pulse width should be greater than 1.5μs |
PUL- | |
DIR+ | Direction signal: high/low level signal, to ensure reliable commutation of motor, directional signal should be established before the pulse signal at least 2μs. The initial direction of the motor is connect to motor wiring, change winding (e.g., A +, A - exchange) can change the direction of the motor running, In DIR high level,the voltage is 4.5 ~ 28 VDC,in low level,voltage is 0 ~ 0.5 V. |
DIR- | |
ENA+ | Enable signal: this input signal is used to enable or prohibit. ENA+ connect 4.5 ~ 28Vdc, ENA- connect low level (or internal optical coupling), the actuator will cut off the electrical current to keep the motor in a free state and the stepper pulse is not responsive. When this function is not required, the enable signal can be suspended. |
ENA- |
High voltage interface:
Name | Function |
GND | DC power grounding |
+Vdc | DC power positive, dc 20~50 VDC, recommended for 36Vdc. |
A+、A- | Motor A phase coil interface |
B+、B- | Motor B phase coil interface |
Control signal mode setting:
Pulse Trigger Edge and Single / Double Pulse Selection: Trigger on rising or falling edge of pulse by PC software ProTuner software or STU debugger. It is also possible to set single pulse mode or double pulse mode. In dual pulse mode, the signal on the direction control terminal must be held high or floating.
Wiring requirements:
1) In order to prevent the driver from being disturbed, it is recommended that useshielded cable for the control signal and the shielding layer should be connect to the ground. Unless otherwise specified, the shielding wire of the control signal is connected to the ground. One end of the shielded cable is grounded. One shielded cable end of the drive is vacant. The same machine only allows grounding at the same point, if it is not a true ground wire, the interference may be serious, then the shield is not connected.
2) The pulse and direction signal lines and the motor lines are not allowed to be tied together side by side, it is better to separate at least 10cm or more. Otherwise, the motor noise may easily disturb the pulse direction signal to cause the motor to be inaccurate and the system unstable.
3) If a power supply for multiple drives, parallel connection should be taken at the power supply, not allow one first to another chain-like connection.
4) It is strictly forbidden to pull the plug of the driver with strong power P2 terminal. When the charged motor stops, a large current will flow through the windings. Plugging and inserting the P2 terminal will result in a huge inductive electromotive force that will burn the driver.
5) It is forbidden to connect the lead wire with tin to the access terminal. Otherwise, the terminal may be damaged due to overheated by the larger contact resistance.
6) The wiring terminals can not be exposed outside the terminals, in case of accidental short circuit and damage the driver
Working (dynamic) current setting:
Output peak current | Output average current | SW1 | SW2 | SW3 | Current self-setting |
Default | on | on | on | When SW1, SW2, SW3 are set to off off off, the required current can be set by PC software,max 4.2 A, resolution 0.1 A. Default current is 1.0A without setting. | |
1.46A | 1.04A | off | on | on | |
1.91A | 1.36A | on | off | on | |
2.37A | 1.69A | off | off | on | |
2.84A | 2.03A | on | on | off | |
3.31A | 2.36A | off | on | off | |
3.76A | 2.69A | on | off | off | |
5.00A | 3.50A | off | off | off | |
Static current setting:
Static current can set by SW4 DIP switch settings, off means the static current is set to half of dynamic current, on means static current and dynamic current is the same. SW4 should be set to off for general use, can reduce the heating of the motor and the driver. About 400ms after the pulse train stopped it will automatically reduced to half current (60% of the actual value), the heat will reduced to 30% theoretically
Subdivision setting:
Step/Rev. | SW5 | SW6 | SW7 | SW8 | Subdivide description |
Default | on | on | on | on | Subdivision Description: The driver subdivision adopts the internal default subdivision when SW5, SW6, SW7 and SW8 are all on. |
400 | off | on | on | on | |
800 | on | off | on | on | |
1600 | off | off | on | on | |
3200 | on | on | off | on | |
6400 | off | on | off | on | |
12800 | on | off | off | on | |
25600 | off | off | off | on | |
1000 | on | on | on | off | |
2000 | off | on | on | off | |
4000 | on | off | on | off | |
5000 | off | off | on | off | |
8000 | on | on | off | off | |
10000 | off | on | off | off | |
20000 | on | off | off | off | |
25000 | off | off | off | off |
Parameter self-tuning function:
If switch the SW4 back and forth within 1 second, the driver can auto-complete the motor parameters and internal parameters adjustment; when the conditions like motor, supply voltage changes, please conduct a self-tuning, otherwise, the motor may not run normal. Note that the pulse can not be input at this time and the direction signal should not change.
Method 1:SW4 from on to off, and then off back to on in 1 second;
Method 2: SW4 from off to on, and then by the dial back to off within 1 second.
Note: This model has power-on auto tuning function.
Power supply options:
JKD5056S can working normally in the specified range of voltage, and use non-regulated DC power supply is best, also can use transformer reduction + bridge rectifier + capacitor filter. However,should notice that voltage ripple peak value after rectifier should not exceed its maximum specified voltage. It is recommended that users use DC voltage lower than the maximum voltage to supply power and avoid the fluctuation of power grid beyond the working range of driver voltage.
If using a regulated switching power supply, be aware that the output current range of the switching power supply needs to be maximized.
Please note:
1) When wiring, pay attention to the positive and negative poles of the power supply.
2) Best use non-regulated power supply;
3) When using non-regulated power supply, the power supply current output capacity should be greater than 60% of the driver set current;
4) When use regulated switching power supply, the output current of the power supply should be greater than or equal to the working current of the driver;
5) To reduce costs, two or three drives can share a power supply, but should ensure that the power supply is large enough.

Nema 23 Stepper Motor / Nema 24 Stepper Motor / Nema 34 Stepper Motor.
FAQS:
1. How can get it started as soon as possible when you first use the drive?
After you correctly connect the power cord, the motor line, the Hall line, the external potentiometer slowly accelerates. After the motor is turned correctly, you can test the enable, direction and other functions. If you are unfamiliar with the product, the initial use should be done after the test. And then it can be installed to the actual use.
2. What will come about if power supply is reverse?
It will immediately burn the drive.
3. What is the maximum of the upper control signal voltage ?
The maximum voltage of the speed regulation signal is 5V. Exceeding this voltage will cause the drive to burn.
4. After the driver has been working for a long time, the shell is hot. Is it normal?
Yes, it is. At room temperature, after long working hours, it is up to 90 degrees. And it will not affect the performance.
5. The power indicator is light, but the motor does not turn and shift, what is the reason?
There may be a mistake in the phase line and the Hall line. Please re-energize the wiring according to the motor manual.
6. Can my motor speed transferred to 6000 with this drive?
The maximum speed of the brushless motor is determined by the parameters of the motor itself. The drive can control the motor speed from 0 to the highest speed.
7. I already have a motor and how to install this drive after wiring?
You must first determine the motor phase and the definition of the Hall line, and then you can connect it with wires. If you are not sure, you need to ask the motor manufacturers. Incorrect wiring can cause damage to the drive.
8. Can I add some features on this drive or do new product development?
Yes, please contact us.