- To Share:

- |

In order to choose the right stepper motor for your application, the following parameters need to be considered:
Changzhou Jkongmotor Co., Ltd was a high technology industry zone in changzhou, china. Our products used in many kinds of machines, such as 3d printer CNC machine, medical equipment, weaving printing equipments and so on.
Holding Torque
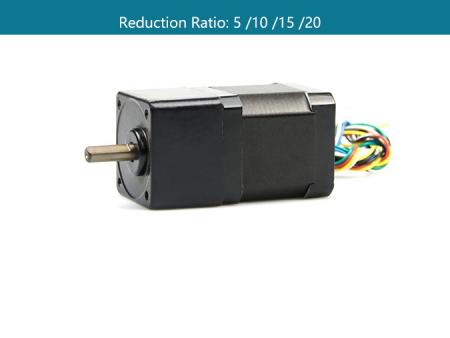
Holding torque is the torque when the rated current is applied on its windings and the motor is not rotating. Usually, you can choose a stepper motor by its size roughly. In general, when the torque is less than 0.8N.m, a stepper motor with a nema size of Nema 8-Nema 17 can be selected, when the torque is about 1~3N.m, Nema 23 stepper motor is more suitable. When the torque is more than 3N.m, Nema 34, Nema 42 should be selected.
Driving Method
Driving method should also be considered because the performance of stepper motor will be greatly affected by different driving modes. Driving methods normally include constant voltage and constant current driving, unipolar and bipolar driving. Compared with unipolar and bipolar driving circuits, unipolar driving circuits uses four power tubes, and the coil current flows in a single direction in the coil. Bipolar driving circuits need eight power tubes, twice that of unipolar. In addition, the forward and reverse currents alternately flow in the coil in the forward and reverse directions, and they alternately conduct. However, simultaneous conduction in a short time will cause a short circuit in the power supply and generate a strong current. Therefore, it is necessary to add a short circuit prevention circuit. The bipolar driving circuit is more complicated than the unipolar. Generally, bipolar driving is used for low speed and high torque load, while unipolar driving is suitable for high speed drive.
Driving Voltage
Driving voltage is the input voltage of the driver, which is related to the use environment of the machine. It can be 12V, 24V, 48V, etc., or AC 24V, 36V, 50V, 60V, 110V, 220V, etc. The influence of voltage selection on the performance of the stepper motor is: if the voltage is higher, the performance of the stepper motor is better, especially the high speed performance of the motor is better.
Driving Current
Driving current is the current at both ends of single-phase winding of stepper motor. The driving current does not mean that the stepper motor can only work under this current, it can be larger than the driving current or smaller than the driving current.
Torque Frequency Characteristic
Torque Frequency Characteristic is the curve plotted between the torque and the frequency of the stepper motor. It is not only the most important dynamic curve of the stepper motor, but also the fundamental basis for selecting a stepper motor. The dynamic torque of the stepper motor depends on the average current when the stepper motor is running. The larger the average current , the larger the stepper motor output torque. Stepper motor output torque is inversely proportional to the speed, which means that the output torque of the stepper motor is large at low speed, and the output torque is small at high speed.
Phase
Phase refers to the number of coil groups of stepper motor, for example, 2 phase stepper motor has 2 groups of coils, and 3 phase stepper motor has 3 groups of coils. Stepper motors with different phases have different working effects. 2 phase stepper motor can provide 0.9 and 1.8 1.8 deg step angle, 3 phase motor can provide 1.2 deg step angle. In most cases, 2 phase stepper motors are used more often. However, in the working environment of high speed and high torque, it is more practical to choose a 3 phase stepper motor.













View More(Total0)Comment Lists