Հայերեն
Դիտումներ՝ 0 Հեղինակ՝ Jkongmotor Հրատարակման ժամանակը՝ 2026-01-16 Ծագում: Կայք
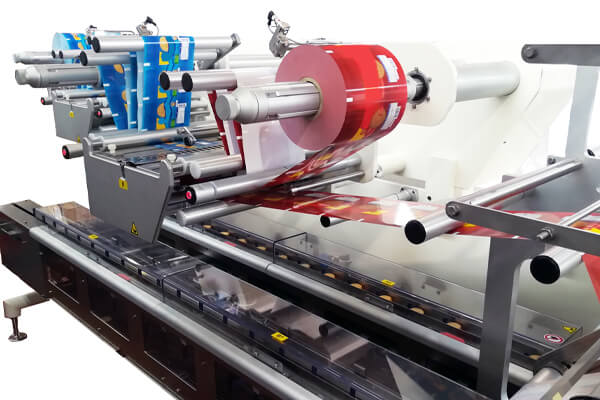
Ժամանակակից փաթեթավորման և արտադրության միջավայրում փաթաթման մեքենաները մեծապես հիմնված են շարժման կառավարման բարձր ճշգրտության համակարգերի վրա : Այս համակարգերի հիմքում ընկած են քայլային շարժիչները , որոնք ապահովում են ճշգրիտ դիրքավորում, կրկնվող շարժում, կայուն ոլորող մոմենտ և ճշգրիտ համաժամացում ֆիլմերի սնուցման, կնքման, կտրման և փոխակրիչի ենթահամակարգերում: Ճիշտ քայլային շարժիչի ընտրությունը հիմնական բնութագրերի համապատասխանության խնդիր չէ, դա ռազմավարական ինժեներական որոշում է , որն ուղղակիորեն ազդում է մեքենայի հուսալիության, փաթաթման որակի, էներգաարդյունավետության, պահպանման ցիկլերի և արտադրության արդյունքի վրա:.
Մենք ներկայացնում ենք համապարփակ, կիրառման վրա հիմնված ուղեցույց, թե ինչպես ընտրել ստեպեր շարժիչներ փաթաթման մեքենաների համար, ծածկող բեռնվածքի դինամիկան, պտտող մոմենտների հաշվարկը, արագության պրոֆիլավորումը, միկրոքայլերի լուծումը, ջերմային կառավարումը, շրջակա միջավայրի պաշտպանությունը, վարորդների համատեղելիությունը և համակարգի օպտիմալացումը:.
Փաթաթման մեքենաները բարդ մեխատրոնիկ համակարգեր են, որոնք համատեղում են շարունակական շարժումը, ընդհատվող ինդեքսավորումը, ֆիլմի բարձր արագությամբ մշակումը և սինխրոն մեխանիկական գործողությունները : Քայլային շարժիչները սովորաբար տեղադրվում են.
Ֆիլմի սնուցման և լարվածության վերահսկման համակարգեր
Կնքման ծնոտի ակտիվացում
Կտրող և պերֆորացիոն մոդուլներ
Ապրանքի դիրքավորման աղյուսակներ
Պիտակավորման և տպման գլխի կրիչներ
Պտտվող և գծային ինդեքսավորման մեխանիզմներ
Քայլային շարժիչների առավելությունը կայանում է նրանում, որ դրանց դիսկրետ քայլ շարժումը, որոշիչ դիրքավորումը, բարձր պահման ոլորող մոմենտը և ծախսարդյունավետ փակ շրջադարձային այլընտրանքները : Փաթաթման մեքենաների համար սա նշանակում է փաթաթման հետևողական երկարություն, միատեսակ կնքման ճնշում, ճշգրիտ հավասարեցում և կրկնվող ցիկլի ժամանակացույց.
Ճիշտ շարժիչի ընտրությունը ապահովում է սահուն արագացում, նվազագույն թրթռում, զրոյական քայլի կորուստ, ջերմային կայունություն և երկարաժամկետ շահագործման ճշգրտություն:.
Որպես պրոֆեսիոնալ առանց խոզանակի հոսանքի շարժիչներ արտադրող, որն աշխատում է 13 տարի Չինաստանում, Jkongmotor-ն առաջարկում է տարբեր Bldc շարժիչներ՝ հարմարեցված պահանջներով, այդ թվում՝ 33 42 57 60 80 86 110 130 մմ, բացի այդ, փոխանցումատուփերը, արգելակները, կոդավորիչները, առանց խոզանակի շարժիչների վարորդներն ու ինտեգրված վարորդներն են:
 |
 |
 |
 |
 |
Պրոֆեսիոնալ պատվերով քայլային շարժիչի ծառայությունները պաշտպանում են ձեր նախագծերը կամ սարքավորումները:
|
| Մալուխներ | Ծածկոցներ | Լիսեռ | Առաջատար պտուտակ | Կոդավորիչ | |
 |
 |
 |
 |
 |
|
| Արգելակներ | Փոխանցման տուփեր | Շարժիչային հավաքածուներ | Ինտեգրված վարորդներ | Ավելին |
Jkongmotor-ն առաջարկում է բազմաթիվ տարբեր լիսեռի տարբերակներ ձեր շարժիչի համար, ինչպես նաև հարմարեցված լիսեռի երկարություններ, որպեսզի շարժիչն անխափան կերպով համապատասխանի ձեր կիրառմանը:
 |
 |
 |
 |
 |
Ապրանքների և պատվիրված ծառայությունների բազմազան տեսականի՝ ձեր նախագծի համար օպտիմալ լուծմանը համապատասխանելու համար:
1. Motors-ն անցել է CE Rohs ISO Reach հավաստագրեր 2. Խիստ ստուգման ընթացակարգերը ապահովում են հետևողական որակ յուրաքանչյուր շարժիչի համար: 3. Բարձրորակ արտադրանքի և բարձրակարգ սպասարկման միջոցով jkongmotor-ը ամուր հիմքեր է ապահովել ինչպես ներքին, այնպես էլ միջազգային շուկաներում: |
| Ճախարակներ | Gears | Լիսեռի կապում | Պտուտակային լիսեռներ | Խաչի փորված հանքեր | |
 |
 |
 |
 |
 |
|
| Բնակարաններ | Բանալիներ | Out Rotors | Հոբբի լիսեռներ | Սնամեջ լիսեռ |
Արդյունաբերական ավտոմատացման մեջ ոլորող մոմենտ ստեղծելը հանդիսանում է յուրաքանչյուր հաջողված կիրառման հիմքը OEM և ODM քայլային շարժիչի : Անկախ նրանից, թե շարժիչը փոխակրիչ է վարում, ինդեքսավորում է պտտվող սեղանը, սնուցում է փաթեթավորման թաղանթը կամ տեղադրում ռոբոտային առանցք, ոլորող մոմենտների սխալ գնահատումը հանգեցնում է բաց թողնված քայլերի, գերտաքացման, թրթռանքի, վաղաժամ ձախողման և արտադրության անկայուն արդյունքի : Պրոֆեսիոնալ ոլորող մոմենտ ճարտարագիտությունը շատ ավելին է, քան տվյալների թերթիկը կարդալը. այն պահանջում է համակարգային մակարդակի ընկալում բեռի վարքագծի, շարժման դինամիկայի, փոխանցման արդյունավետության և իրական աշխատանքային պայմանների մասին:.
Այս բաժինը ներկայացնում է համապարփակ ինժեներական մեթոդոլոգիա՝ OEM և ODM ստեպպեր շարժիչների իրական գործառնական ոլորող մոմենտների պահանջները ճշգրիտ և վստահ հաշվարկելու համար:
Ոլորող մոմենտը մեկ արժեք չէ. դա բազմաթիվ փոխազդող ուժերի գումարն է: մեխանիկական համակարգի ներսում OEM և ODM նախագծերում ոլորող մոմենտը պետք է վերլուծվի ստատիկ, դինամիկ և անցողիկ պայմաններում.
Հիմնական մոմենտի կատեգորիաները ներառում են.
Բեռի ոլորող մոմենտ – աշխատանքային բեռը տեղափոխելու համար անհրաժեշտ ոլորող մոմենտ
Իներցիոն ոլորող մոմենտ - զանգվածը արագացնելու և դանդաղեցնելու համար անհրաժեշտ ոլորող մոմենտ
Շփման ոլորող մոմենտ – կորուստներ առանցքակալներից, գոտիներից, կնիքներից և ուղեցույցներից
Ձգողական ոլորող մոմենտ – ուղղահայաց կամ թեք առանցքների վրա գործող բեռներ
Խանգարման ոլորող մոմենտ – անկանոն ուժեր կտրումից, կնքումից, սեղմումից կամ հարվածներից
Իրական գործառնական ոլորող մոմենտը համակցված իրական ժամանակի պահանջարկն է , այլ ոչ թե շարժիչի գնահատված պահման մոմենտը:
Յուրաքանչյուր ոլորող մոմենտ հաշվարկ սկսվում է հստակ մեխանիկական մոդելով:
Պտտվող համակարգերի համար.
T բեռ =F×r
Որտեղ:
T = ոլորող մոմենտ (N·m)
F = կիրառական ուժ (N)
r = շառավիղ (մ)
Կապարի պտուտակներ կամ գոտիներ օգտագործող գծային համակարգերի համար ուժի և ոլորող մոմենտների փոխարկումը պետք է ներառի բարձրությունը, արդյունավետությունը և մեխանիկական կրճատումը:.
Կապարի պտուտակների համար.
T=(2π×η)/(F×p)
Որտեղ:
p = պտուտակային քայլ
η = մեխանիկական արդյունավետություն
OEM և ODM ինժեներները պետք է ճշգրիտ չափեն.
Բեռի զանգված
Պտտման իներցիա
Ճախարակ կամ փոխանցման շառավիղ
Փոխանցման գործակիցը
Մեխանիկական արդյունավետություն
Նույնիսկ փոքր սխալ հաշվարկները կարող են 30–60% -ով փոխել ոլորող մոմենտների պահանջարկը , ինչը բավական է ամբողջ շարժման համակարգը ապակայունացնելու համար:
Արդյունաբերական մեքենաներում քայլային շարժիչները հազվադեպ են աշխատում մշտական արագությամբ: Նրանք անընդհատ սկսում են, դադարեցնում, ինդեքսավորում, հետադարձում և համաժամացում : Այս պայմաններում իներցիոն ոլորող մոմենտը դառնում է գերիշխող։
T իներցիա =J×α
Որտեղ:
J = ընդհանուր արտացոլված իներցիա (kg·m²)
α = անկյունային արագացում (rad/s⊃2;)
Ընդհանուր իներցիան ներառում է.
Շարժիչի ռոտորի իներցիա
Միացման իներցիա
Փոխանցման տուփի իներցիա
Բեռի իներցիա արտացոլված փոխանցման միջոցով
Գոտի շարժիչների և կապարի պտուտակների համար իներցիան պետք է վերածվի համարժեք պտտվող իներցիայի.
Բարձր արագությամբ OEM մեքենաներում իներցիոն ոլորող մոմենտը կարող է 2–4 անգամ գերազանցել բեռնվածքի ոլորող մոմենտը ՝ դարձնելով այն նախագծման առաջնային սահմանափակում:
Իրական մեքենաները իդեալական մեխանիկական համակարգեր չեն: Ոլորող մոմենտը շարունակաբար սպառվում է.
առանցքակալի նախաբեռնում
Կնիքի ձգում
Ուղղորդող երկաթուղային դիմադրություն
Գոտու ճկման կորուստներ
Հաղորդալարերի ցանցերի անարդյունավետությունը
Բացի այդ, շատ OEM հավելվածներ ներկայացնում են խանգարման ոլորող մոմենտ , ինչպիսիք են՝
Կտրման դիմադրություն
Կնքման ճնշում
Դակիչ ազդեցություն
Ֆիլմի լարվածության տատանում
Այս ուժերը հաճախ ոչ գծային են և ժամանակով փոփոխվող , ինչը նշանակում է, որ դրանք պետք է գնահատվեն պահպանողականորեն:
Պրոֆեսիոնալ ոլորող մոմենտ ճարտարագիտությունը միշտ ավելացնում է շփման չափված գործակից կամ էմպիրիկ բեռնվածքի մարժան , ոչ երբեք ենթադրություններ:
Ուղղահայաց կամ թեք առանցքներում գրավիտացիան ներմուծում է կայուն ոլորող մոմենտ բաղադրիչ.
T գրավիտացիա =m×g×r
Որտեղ:
մ = զանգված
g = գրավիտացիոն արագացում
r = արդյունավետ շառավիղ
Ձգողական ոլորող մոմենտը որոշում է.
Պահանջվող պահման ոլորող մոմենտ
Արգելակի կամ փոխանցման տուփի անհրաժեշտություն
Հետ մեքենա վարելու վտանգ
Անվտանգության սահմանային ձևավորում
OEM բարձրացման, բաշխման և Z առանցքի համակարգերում ինքնահոս ոլորող մոմենտը հաճախ սահմանում է շարժիչի շրջանակի նվազագույն չափը.
Իրական գործառնական մոմենտը հաշվարկվում է հետևյալ կերպ.
T ընդհանուր =T բեռնվածություն +T իներցիա +T շփում +T ձգողականություն +T խանգարում
Այնուհետև այս արժեքը պետք է գնահատվի հետևյալ կերպ.
Պիկ արագացում
Առավելագույն արագություն
Ամենավատ ծանրաբեռնվածությունը
Ամենաբարձր աշխատանքային ջերմաստիճանը
OEM և ODM աստիճանային շարժիչները ընտրվում են հասանելի դինամիկ ոլորող մոմենտ ստեղծելու հիման վրա , ոչ թե ստատիկ պահման ոլորող մոմենտ:
Յուրաքանչյուր քայլային շարժիչ ցուցադրում է պտտվող ոլորող մոմենտների կորը, երբ արագությունը մեծանում է: Ինժեներները պետք է ստուգեն.
Հասանելի ոլորող մոմենտ աշխատանքային RPM- ում
Ձգվող ոլորող մոմենտը առավելագույն արագացման ժամանակ
Կայունություն միջին գոտու ռեզոնանսային գոտիների միջոցով
Շարժիչը, որն ապահովում է 3 Ն·մ պահող ոլորող մոմենտ, կարող է ապահովել միայն 0,9 Ն·մ արտադրական արագությամբ : Այս անհամապատասխանությունը OEM նախագծի ձախողման ամենատարածված պատճառներից մեկն է:
Մոմենտի ոչ մի հաշվարկ ամբողջական չէ առանց ինժեներական մարժայի: OEM և ODM լավագույն փորձը կիրառվում է.
1.3–1.5× անվտանգության գործակից կայուն բեռների համար
1,6–2,2× անվտանգության գործակից՝ հարվածային կամ ցիկլային բեռների համար
համար ավելի բարձր մարժաներ Բարձր ջերմաստիճանի կամ շարունակական աշխատանքային համակարգերի
Անվտանգության գործոնները հաշվի են առնում.
Արտադրական հանդուրժողականություն
Երկարատև մաշվածություն
Քսայուղային տատանումներ
Լարման տատանում
Գործընթացի անսպասելի փոփոխություններ
Նրանք ապահովում են զրոյական քայլի կորուստ, կայուն դիրքավորում և ջերմային անվտանգություն.
Ոլորման հզորությունը ուղղակիորեն կապված է ոլորման ջերմաստիճանի հետ : Շարժիչային շարժիչը, որն արտադրում է բարձր ոլորող մոմենտ ցածր արագությամբ, կարող է գերտաքանալ շարունակական աշխատանքի ժամանակ.
Հետևաբար, OEM ոլորող մոմենտ ճարտարագիտությունը ներառում է.
RMS մոմենտի հաշվարկ
Աշխատանքային ցիկլի պրոֆիլավորում
Շրջակա միջավայրի ջերմաստիճանի ուղղում
Սառեցման մեթոդի վերլուծություն
Շարժիչները օպտիմալ կերպով ընտրված են, որպեսզի աշխատեն անվանական հոսանքի 70–80% -ով , առավելագույնի հասցնելով կյանքի տևողությունը՝ պահպանելով ոլորող մոմենտների մարժան:
Ժամանակակից OEM և ODM ձևավորումներն ավելի ու ավելի շատ են օգտագործում փակ հանգույցի աստիճանային շարժիչներ : Կոդավորիչները թույլ են տալիս.
Իրական ժամանակի մոմենտ մոնիտորինգ
Կախովի հայտնաբերում
Բեռի տատանումների փոխհատուցում
Հարմարվողական ընթացիկ հսկողություն
Փակ շրջանի ճարտարապետությունը ճարտարագետներին հնարավորություն է տալիս հաստատել իրական ոլորող մոմենտների պահանջարկը մեքենայի շահագործման ընթացքում ՝ կատարելագործելով շարժիչի ընտրությունը արտադրության տվյալների միջոցով՝ միայն տեսական գնահատականների փոխարեն:
Ոլորող մոմենտ ստեղծելը տվյալների թերթիկի վարժություն չէ, այն մեխանիկական, էլեկտրական և ջերմային համակարգի կարգապահություն է : Պատշաճ հաշվարկված աշխատանքային մոմենտը.
Վերացնում է բաց թողնված քայլերը
Նվազեցնում է թրթռումը
Կանխում է գերտաքացումը
Երկարացնում է կրող և ոլորուն կյանքը
Կայունացնում է արտադրանքի որակը
OEM և ODM քայլային շարժիչի նախագծերը հաջողվում են, երբ ոլորող մոմենտը մշակվում է իրական ֆիզիկայից, իրական բեռներից և իրական աշխատանքային ցիկլերից , այլ ոչ թե անվանական ենթադրություններից:
Երբ ոլորող մոմենտ ստեղծելու ինժեներությունն իրականացվում է պրոֆեսիոնալ կերպով, քայլային շարժիչը դառնում է ոչ միայն բաղադրիչ, այլ ճշգրիտ շարժման հիմք, որն ապահովում է մեքենայի ողջ կյանքի ցիկլը:
Փաթաթման մեքենաները համատեղում են դանդաղ լարվածությամբ վերահսկվող սնուցումը հետ բարձր արագությամբ ինդեքսավորման և կնքման ցիկլերի : Քայլային շարժիչները պետք է պահպանեն ոլորող մոմենտների կայունությունը լայն արագությունների միջակայքում.
Առավելագույն RPM գնահատված մոմենտով
Ձգվող պտտման կորը
Ռեզոնանսային ճնշում
Բարձր հաճախականությամբ քայլ արձագանք
շարժիչներն Ռոտորի ցածր իներցիայով և օպտիմիզացված մագնիսական սխեմաներով ավելի հարմար են արագ արագացման և դանդաղեցման համար : Շարժիչի զուգակցումը ժամանակակից microstepping վարորդի հետ ապահովում է ցածր արագության սահուն շարժում, նվազեցված թրթռում և ավելի հանգիստ աշխատանք:.
Մենք առաջնահերթություն ենք տալիս շարժիչներին, որոնք ապահովում են ոլորող ոլորող մոմենտների հարթ կորեր, միջին գոտու նվազագույն ռեզոնանս և ուժեղ կայունություն.
Ճշգրիտ կառավարումը որոշիչ առավելությունն է OEM և ODM stepper շարժիչ համակարգերի : Ի տարբերություն սովորական շարժիչների, քայլային շարժիչներն ապահովում են դետերմինիստական, աճող շարժումներ , ինչը նրանց դարձնում է իդեալական այնպիսի ծրագրերի համար, որոնք պահանջում են ճշգրիտ դիրքավորում, համաժամացված շարժում և կրկնվող ճշգրտություն : Այնուամենայնիվ, իրական ճշգրտությունը ձեռք չի բերվում միայն շարժիչի ընտրությամբ, այն առաջանում է քայլի անկյան, միկրոքայլերի տեխնոլոգիայի, կառավարման էլեկտրոնիկայի և մեխանիկական փոխանցման համակցված ճարտարագիտության արդյունքում:.
Այս բաժինը տրամադրում է համապարփակ տեխնիկական վերլուծություն այն մասին, թե ինչպես են քայլի անկյունը, միկրոքայլը և լուծումը կարգավորում OEM և ODM ստեպպեր շարժիչների իրական դիրքավորման հնարավորությունները:
Քայլի անկյունը քայլային շարժիչի հիմնական մեխանիկական աճն է՝ ամենափոքր ամբողջական պտույտը, որը կարող է կատարել ռոտորը, երբ սնուցվում է ստանդարտ քայլային ռեժիմում:
Արդյունաբերական քայլի ընդհանուր անկյունները ներառում են.
1,8° մեկ քայլի համար (200 քայլ մեկ հեղափոխության համար)
0,9° մեկ քայլի համար (400 քայլ մեկ հեղափոխության համար)
Մասնագիտացված նմուշներ՝ 1,2°, 7,5°, 15° կամ հատուկ անկյուններ OEM-ի նիշային պահանջների համար
Ավելի փոքր քայլի անկյունը էապես մեծացնում է բնիկ մեխանիկական լուծաչափը ՝ բարելավելով.
Դիրքորոշման հատիկություն
Ցածր արագությամբ սահունություն
Փակ օղակի ուղղման ճշգրտություն
Բեռի կայունություն
OEM և ODM նախագծերի համար, որոնք պահանջում են բարձր դիրքային հավատարմություն , ինչպիսիք են օպտիկական սարքավորումները, կիսահաղորդչային գործիքները, պիտակավորման մեքենաները և բժշկական ավտոմատացումը, 0,9° շարժիչները ապահովում են բարձրակարգ մեխանիկական հիմք:
Մեխանիկական լուծումը սահմանվում է հետևյալ կերպ.
Բանաձև=360°Քայլի անկյուն×Փոխանցման հարաբերակցություն Բանաձևը = rac{360°}{Քայլ Անկյուն imes Gear Ratio}
Բանաձև=Քայլի անկյուն×Փոխանցման հարաբերակցություն360°
Փոխանցման տուփերի, գոտիների կամ կապարի պտուտակների հետ համակցվելիս համակարգի վերջնական լուծումը կարող է հասնել միկրոն կամ ենթամիկրոն մակարդակների.
Այնուամենայնիվ, լուծումը միշտ պետք է դիտարկել հետևյալի կողքին.
Հակազդեցություն
Էլաստիկ դեֆորմացիա
Փոխանցման արդյունավետություն
Առանցքակալների համապատասխանություն
OEM ինժեներները կենտրոնանում են ոչ միայն տեսական լուծման վրա, այլև արդյունավետ լուծման վրա , որն արտացոլում է իրական կրկնվող դիրքավորումը բեռի տակ:.
Microstepping-ը շարժիչի յուրաքանչյուր քայլը բաժանում է ավելի փոքր էլեկտրական քայլերի՝ ճշգրիտ վերահսկելով հոսանքը շարժիչի ոլորուն միջով:
Տիպիկ microstepping գործակիցները ներառում են.
1/2, 1/4, 1/8, 1/16
1/32, 1/64, 1/128, 1/256
1.8° շարժիչը 1/16 միկրո աստիճանով կատարում է 3200 քայլ մեկ պտույտում.
0,9° շարժիչը 1/32 միկրո աստիճանով կատարում է 12800 քայլ մեկ պտույտում.
Microstepping-ը կտրուկ բարելավում է.
Ցածր արագությամբ սահունություն
Վիբրացիայի ճնշում
Ակուստիկ աղմուկի նվազեցում
Շարժման ինտերպոլացիա
OEM և ODM մեքենաների համար, որոնք կատարում են ֆիլմերի սնուցում, օպտիկական սկանավորում, մակերևույթի ավարտում և միկրո դիրքավորում , միկրոսթեյփը կարևոր է կայուն շարժման համար:
Կարևոր է տարբերակել.
Հրամանի լուծում – մեկ հեղափոխության համար էլեկտրական միկրոքայլերի քանակը
Իրական մեխանիկական լուծում – ամենափոքր, հուսալիորեն կրկնվող շարժումը ծանրաբեռնվածության տակ
Մագնիսական ոչ գծայինության, զսպման ոլորող մոմենտների և բեռնվածքի փոխազդեցության պատճառով միկրոքայլերը չափերով կատարյալ հավասար չեն : Մինչդեռ միկրոսթեյփինգը մեծացնում է հարթությունը, այն համամասնորեն չի բարձրացնում բացարձակ ճշգրտությունը:
OEM ինժեներները սովորաբար վերաբերվում են microstepping-ին որպես շարժման որակի բարելավման , այլ ոչ թե մեխանիկական լուծման ուղղակի փոխարինման: Բարձր ճշգրտության հավելվածները համատեղում են.
Քայլերի փոքր անկյունները
Ճշգրիտ հանդերձանքի կրճատում
Կոդավորիչի հետադարձ կապ
Կառուցվածքային կոշտություն
Սա ապահովում է կրկնվող դիրքավորումը , ոչ միայն ավելի նուրբ հրամանների ավելացումներ:
Քանի որ միկրոքայլը մեծանում է, աճող ոլորող մոմենտը մեկ միկրոքայլի վրա նվազում է : Մինչ ամբողջ ոլորող մոմենտը մնում է անփոփոխ, յուրաքանչյուր միկրոքայլ տալիս է այդ ոլորող մոմենտի մի մասը:
Սա ազդում է.
Ստատիկ կոշտություն
Անհանգստության մերժում
Բեռնման կայունություն ցածր արագությամբ
OEM և ODM համակարգերի համար, որոնք ենթարկվում են կտրող ուժերին, կնքման ճնշմանը կամ թրթռմանը, չափից ավելի մանրադիտակը առանց մեխանիկական առավելությունների կարող է առաջացնել.
Միկրո դիրքի շեղում
Նվազեցված պահման կայունությունը
Զգայունություն արտաքին մոմենտի նկատմամբ
Պրոֆեսիոնալ ձևավորումները հավասարակշռում են միկրոքայլերի գործակիցները փոխանցումների կրճատման, փակ հանգույցի ուղղման կամ հիմնական ոլորող մոմենտի շարժիչների հետ.
Ճշգրիտությունը հաճախ ավելի արդյունավետ է ձեռք բերվում մեխանիկական օպտիմալացման միջոցով , քան էլեկտրոնային ստորաբաժանումը:
Օրինակները ներառում են.
Մոլորակային փոխանցման տուփեր՝ անկյունային լուծման բազմապատկման համար
Առաջատար պտուտակներ ուղիղ գծային շարժման ճշգրտության համար
Ժամկետային գոտիներ համար սինխրոն բազմաառանցքային ճշգրտության
Հարմոնիկ ռեդուկտորներ զրոյական հակադարձ միկրո դիրքավորման համար
Ինտեգրելով քայլային շարժիչները պատշաճ նախագծված փոխանցման տուփերի հետ՝ OEM համակարգերը հասնում են.
Բեռի ավելի մեծ ոլորող մոմենտ
Ավելի լավ խանգարում է անձեռնմխելիությանը
Բարելավված բացարձակ ճշգրտություն
Ավելի երկար ծառայության ժամկետ
Հետևաբար, բանաձևի ճարտարագիտությունը մեխատրոնիկ գործընթաց է , այլ ոչ թե առանձին շարժիչ որոշում:
Փակ օղակի աստիճանային շարժիչները ներառում են կոդավորիչներ, որոնք անընդհատ վերահսկում են ռոտորի դիրքը: Սա հնարավորություն է տալիս.
Քայլի կորստի վերացում
Դիրքի սխալի ուղղում
Բեռի հարմարվողական ընթացիկ հսկողություն
Ավելի բարձր օգտագործման microstep ճշգրտություն
OEM և ODM սարքավորումների համար, որտեղ լուծումն ուղղակիորեն ազդում է արտադրանքի որակի վրա, ինչպիսիք են՝ ընտրելու և տեղադրելու մեքենաները, տեսլականով առաջնորդվող հարթակները և բժշկական գործիքները, փակ հանգույցի ստեպ համակարգերը փոխակերպում են միկրոսթեյփը մոտարկումից ստուգելի կառավարման ռազմավարության:.
Կոդավորիչները թույլ են տալիս ինժեներներին սահմանել իրական կրկնվող լուծաչափը , ոչ միայն տեսական քայլերի հաշվարկը:
Ճշգրիտ հսկողությունը կախված է նաև.
Վարորդի ընթացիկ լուծում
Զարկերակային ազդանշանի կայունություն
Վերահսկիչ հանգույցի ժամանակացույցը
EMI անձեռնմխելիություն
OEM շարժման համակարգերը պետք է ապահովեն.
Մաքուր դիֆերենցիալ զարկերակային ազդանշաններ
Բարձր հաճախականությամբ վարորդի հնարավորություն
Պաշտպանված մալուխներ
Ճիշտ հողային ճարտարապետություն
Ազդանշանի աղավաղումը բարձր միկրոքայլ հաճախականություններում կարող է ավելի վատացնել լուծաչափը, քան մեխանիկական սահմանափակումները:
Ստեպեր շարժիչային համակարգերում ճշգրիտ կառավարումը արդյունք է էլեկտրամագնիսական դիզայնի, էլեկտրոնային կառավարման և մեխանիկական կատարման .
Ճիշտ մշակված քայլի անկյունը և միկրոքայլերի ռազմավարությունները ապահովում են.
Կանխատեսելի դիրքավորում
Գերազանց հարթ շարժում
Կայուն ցածր արագությամբ վարքագիծ
Բարձր կրկնելիություն
Նվազեցված մեխանիկական սթրես
OEM և ODM նախագծերը հաջողվում են, երբ լուծումը մշակվում է որպես համակարգի պարամետր ՝ ինտեգրելով շարժիչի ֆիզիկան, փոխանցման նախագծումը և կառավարման էլեկտրոնիկան միասնական շարժման լուծման մեջ:
Երբ ճշգրիտ կառավարումը լիովին օպտիմիզացված է, քայլային շարժիչներն ապահովում են ոչ միայն շարժում, այլև չափելի, կրկնվող, արդյունաբերական կարգի դիրքավորման ճշգրտություն, որը կազմում է առաջադեմ ավտոմատացման հիմքը:
Փաթաթման մեքենաները հաճախ աշխատում են 24/7 արդյունաբերական արտադրության ցիկլերում : Քայլային շարժիչները պետք է ապահովեն շարունակական ոլորող մոմենտ առանց ջերմային ծանրաբեռնվածության.
Գնահատված հոսանք ընդդեմ գործող հոսանքի
Շարժիչի մեկուսացման դաս
Ջերմաստիճանի բարձրացման կորեր
Շրջանակի չափի ջերմության ցրման հզորությունը
աշխատող մեծածավալ շարժիչները 70–80% անվանական հոսանքով գերազանցում են ամբողջ ծանրաբեռնվածությամբ աշխատող փոքր չափի շարժիչներին՝ ապահովելով.
Ցածր ոլորուն ջերմաստիճանը
Ավելի երկար կրող կյանք
Բարելավված մագնիսական կայունություն
Նվազեցված ապամագնիսացման ռիսկը
Մենք շեշտը դնում ենք ջերմային անջատման վերլուծության վրա , երբ ընտրում ենք շարժիչներ կնքման և կտրման կայանների համար, որտեղ շրջակա միջավայրի ջերմաստիճանը բարձր է:.
Քայլային շարժիչները պետք է անխափան կերպով ինտեգրվեն փաթաթման մեքենայի ճարտարապետության մեջ:
Ստանդարտ շրջանակի չափսեր (NEMA 17, 23, 24, 34, 42)
Լիսեռի տրամագիծը և երկարությունը
Ստեղնավորված կամ D- կտրված լիսեռներ
Ֆլանների համատեղելիություն
Կրող բեռի գնահատականներ
Փաթաթող մեքենաները ճառագայթային բեռներ են պարտադրում գոտիներից, առանցքային բեռներ՝ կապարի պտուտակներից և ոլորող բեռներ փոխանցումատուփերից : Առանց առանցքակալների համապատասխան բնութագրերի ընտրված շարժիչները կունենան վաղաժամ մեխանիկական խափանումներ .
Այնտեղ, որտեղ ճշգրտությունն ու դիմացկունությունը կարևոր են, մենք խորհուրդ ենք տալիս փոխանցման տուփի մեջ ինտեգրված ստեպպեր շարժիչներ ՝ մոլորակային ռեդուկտորներով ապահովելով.
Ավելի բարձր ելքային ոլորող մոմենտ
Բարելավված լուծում
Նվազեցված ռեզոնանս
Երկարացված ծառայության ժամկետը
Փաթաթման մեքենաները հաճախ աշխատում են այնպիսի միջավայրերում, որոնք ենթարկվում են.
Պլաստիկ փոշի
Սոսինձներ և յուղեր
Խոնավություն
Մաքրող քիմիական նյութեր
Ջերմաստիճանի տատանումներ
Հետևաբար, աստիճանային շարժիչները պետք է համապատասխանեն շրջակա միջավայրի և պարիսպների համապատասխան չափանիշներին.
IP54–IP67 կնքման տարբերակներ
Կոռոզիոն դիմացկուն պատյաններ
Բարձր ջերմաստիճանի մեկուսացման ծածկույթներ
Պաշտպանված մալուխներ և կնքված միակցիչներ
Սննդամթերքի և դեղագործական փաթեթավորման մեքենաների համար մենք առաջնահերթություն ենք տալիս լվացման համար նախատեսված շարժիչներին, չժանգոտվող պողպատից լիսեռներին և կնքված առանցքակալներին ՝ պահպանելով հիգիենիկ աշխատանքը և կանոնակարգային համապատասխանությունը:.
Ստեպպերի շարժիչի աշխատանքը նույնքան լավն է, որքան դրա շարժիչը և կառավարման էլեկտրոնիկան.
Մշտական ընթացիկ կարգավորում
Բարձր հաճախականությամբ միկրոսթեյփինգ
Հակառեզոնանսային ալգորիթմներ
Փակ շրջանի հետադարձ կապի տարբերակներ
Fieldbus կապի աջակցություն
Ժամանակակից փաթաթող մեքենաներն ավելի ու ավելի են ինտեգրում փակ հանգույցի ստեպպեր համակարգերը , որոնք համատեղում են ստեպեր շարժիչների պարզությունը կոդավորիչի հետադարձ կապի հետ ՝ մատուցելով.
Ոչ մի կորած քայլ
Իրական ժամանակում սխալի հայտնաբերում
Բարելավված դինամիկ ոլորող մոմենտ
Սերվոյի նման հուսալիություն ավելի ցածր գնով
Մենք խորհուրդ ենք տալիս շարժիչներ ընտրել միայն վարորդի լարումը, ընթացիկ հզորությունը, կառավարման ազդանշանները և համակարգի ավտոբուսի ճարտարապետությունը որոշելուց հետո:.
Փաթաթման մեքենաները գործում են խաչմերուկում շարժման ճշգրիտ հսկողության, բարձր ցիկլի դիմացկունության և շարունակական արդյունաբերական թողունակության : OEM և ODM արտադրության մեջ քայլային շարժիչները ընդհանուր բաղադրիչներ չեն. դրանք կիրառական ինժեներական շարժիչներ են , որոնք պետք է օպտիմիզացված լինեն փաթաթման համակարգի յուրաքանչյուր ֆունկցիոնալ մոդուլի համար: Ֆիլմի սնուցումը, արտադրանքի դիրքավորումը, կնքումը, կտրումը և ինդեքսավորումը բոլորն առաջացնում են հստակ մեխանիկական, ջերմային և դինամիկ պահանջներ : Կիրառմանն առնչվող օպտիմիզացիան ապահովում է, որ քայլային շարժիչները ապահովում են կայուն ոլորող մոմենտ, ճշգրիտ դիրքավորում, հարթ շարժում և երկարաժամկետ հուսալիություն իրական արտադրության պայմաններում:
Այս բաժինը մանրամասնում է, թե ինչպես են OEM և ODM ստեպպեր շարժիչները մասնագիտորեն օպտիմիզացված մեքենաների փաթաթման միջավայրերի համար:
Ժամանակակից փաթաթող մեքենան բաղկացած է բազմաթիվ համակարգված առանցքներից, որոնցից յուրաքանչյուրն ունի իր շարժման պրոֆիլը.
Շարունակական ցածր արագությամբ ֆիլմի սնուցում
Բարձր արագությամբ ընդհատվող ինդեքսավորում
Բարձր ուժով կնքման և կտրող հարվածներ
Սինխրոն պտտվող և գծային դիրքավորում
Արագ արագացման և դանդաղման ցիկլեր
Յուրաքանչյուր առանցք պահանջում է քայլային շարժիչի լուծում, որը հարմարեցված է.
Ոլորման կորի ձևը
Ռոտորի իներցիա
Քայլի անկյուն
Microstepping վարքագիծը
Ջերմային հզորություն
Շրջակա միջավայրի պաշտպանություն
Օպտիմալացումը սկսվում է քարտեզագրմամբ շարժման ամբողջական հաջորդականության , գագաթնակետային բեռների, բնակության ժամանակների, ցնցումների ուժի և երկարատև պահպանման պայմանների հայտնաբերմամբ:
Ֆիլմի սնուցման համակարգերը պահանջում են բացառապես հարթ, ցածր արագությամբ շարժում ՝ հետևողական ոլորող մոմենտով, կանխելու համար.
Ֆիլմի ձգում
Կնճռոտվելը
Սխալ դասավորվածություն
Գրանցման սխալներ
OEM օպտիմիզացված քայլային շարժիչները ֆիլմի մշակման համար սովորաբար ունեն.
Ռոտորի ցածր իներցիա արագ արձագանքման համար
Բարձր microstepping համատեղելիություն
Ուժեղ ցածր արագության ոլորող մոմենտ ստեղծելու գծայինություն
Նվազագույն պտտվող ոլորող մոմենտ ալիք
Այս շարժիչները հաճախ զուգակցվում են.
Ճշգրիտ microstepping վարորդներ
Փակ շրջանի հետադարձ կապ
Բարձր լուծաչափով կոդավորիչներ
Ցածր թիկունքի գոտի կամ գլանային մեխանիզմներ
Այս կոնֆիգուրացիան ապահովում է կայուն լարվածության վերահսկում, երկարության ճշգրիտ չափում և առանց թրթռումների սնուցում , նույնիսկ չափազանց ցածր RPM-ում:
Կնքման միավորները ներկայացնում են ամենաբարձր մեխանիկական սթրեսի գոտիները : փաթաթման մեքենաների Շարժիչները, որոնք վարում են հերմետիկ ծնոտները, գլանները կամ թիթեղները պետք է դիմակայեն.
Բարձր գագաթնակետային ուժեր
Բարձրացված շրջակա միջավայրի ջերմաստիճանը
Արագ փոխադարձ շարժում
Շարունակական ջերմային բեռնում
OEM և ODM քայլային շարժիչները, որոնք օպտիմիզացված են կնքման կայանների համար, ընդգծում են.
Մեծ ոլորող մոմենտ խտություն
Ստատորի ամուր ջերմային ուղիներ
Բարձր ջերմաստիճանի մեկուսացման համակարգեր
Չափազանց մեծ առանցքակալներ և լիսեռներ
Փոխանցման օժանդակությամբ քայլային շարժիչները հաճախ կիրառվում են հետևյալի համար.
Բազմապատկել ելքային ոլորող մոմենտը
Բարելավել կոշտությունը
Կայունացնել միկրո դիրքավորումը
Նվազեցնել ռեզոնանսը
Արդյունքը հետևողական կնքման ճնշումն է, ջերմության միատեսակ բաշխումը և ծնոտի ճշգրիտ հավասարեցումը , որոնք ուղղակիորեն ազդում են փաթեթի ամբողջականության վրա:
Կտրող մեխանիզմները ներկայացնում են հարվածային բեռներ և ոչ գծային դիմադրություն : Շարժիչները պետք է անմիջապես արձագանքեն՝ պահպանելով դիրքային կրկնելիությունը.
Օպտիմալացման ռազմավարությունները ներառում են.
Բարձր սեղմում և պահող ոլորող մոմենտ
Ամրապնդված ռոտորային հավաքույթներ
Կոշտ եզրային կառույցներ
Կոդավորված փակ հանգույցի գործողություն
Փակ օղակի աստիճանային շարժիչները հատկապես արժեքավոր են դանակի շարժիչներում, ինչը հնարավորություն է տալիս.
Իրական ժամանակի տաղավարի հայտնաբերում
Ավտոմատ ոլորող մոմենտ փոխհատուցում
Զրո քայլ կորստի կատարում
Սա ապահովում է կտրվածքի ճշգրիտ տեղադրում, սայրերի մաշվածության նվազեցում և պաշտպանություն մեխանիկական ցնցումներից.
Ինդեքսավորման և արտադրանքի դիրքավորման մոդուլները պահանջում են պահելու բարձր կայունություն, կանգառի ճշգրիտ ճշգրտություն և արագ համաժամացում հոսանքով և ներքևում գտնվող գործընթացների հետ:
Այս ենթահամակարգերում OEM օպտիմիզացված քայլային շարժիչներն ունեն.
Բարձր դիրքային կոշտություն
Կայուն ոլորող մոմենտ միջինից բարձր արագություններում
Ռոտորի իներցիայի օպտիմիզացված համընկնում
Մոլորակային կամ ներդաշնակ հանդերձանքի ինտեգրում
Այս շարժիչները պահպանում են ճշգրիտ անկյունային կամ գծային դիրքը նույնիսկ այն դեպքում, երբ ենթարկվում են.
Արտադրանքի բեռի հանկարծակի փոփոխություններ
Փոխակրիչի ազդեցությունները
Ուղղությունների հակադարձումներ
Սա ապահովում է փաթաթման հետևողական հավասարեցում, պիտակի գրանցում և արտադրանքի կենտրոնացում.
Փաթաթման մեքենաներն աշխատում են պահանջկոտ արտադրական միջավայրերում: OEM և ODM քայլային շարժիչները հաճախ հարմարեցվում են հետևյալի համար.
Փոշու և ֆիլմի բեկորների ազդեցություն
Կպչուն գոլորշիներ
Մաքրող միջոցներ
Բարձր խոնավություն
Մեքենայի բարձր ջերմաստիճան
Շրջակա միջավայրի օպտիմալացումը ներառում է.
Կնքված պատյաններ և առանցքակալներ
Կոռոզիոն դիմացկուն լիսեռներ
IP գնահատված պարիսպներ
Բարձրորակ մալուխային մեկուսացում
Ինտեգրված լարվածության ռելիեֆի նմուշներ
Կառուցվածքային առումով շարժիչները կարող են հարմարեցվել հետևյալով.
Ընդլայնված լիսեռներ
Ինտեգրված ագույցներ
Կցաշուրթերի փոփոխություններ
Ներկառուցված սենսորներ
Կոմպակտ ձևի գործոններ
Սա ապահովում է անխափան մեխանիկական ինտեգրում և երկարաժամկետ գործառնական կայունություն.
Փաթաթման մեքենաները հաճախ աշխատում են մի քանի հերթափոխով՝ նվազագույն պարապուրդով : Ջերմային ճարտարագիտությունը դառնում է կրիտիկական:
OEM և ODM ջերմային օպտիմալացման ռազմավարությունները ներառում են.
Ընդլայնված ստատորի զանգված ջերմության ցրման համար
Օպտիմիզացված ոլորուն դիմադրություն
Նվազեցված աշխատանքային հոսանքներ
Ինտեգրված ջերմասուզման ուղիներ
Ընտրովի հարկադիր օդով կամ հաղորդիչ սառեցում
Ջերմային օպտիմիզացված շարժիչները պահպանում են.
Կայուն մագնիսական կատարում
Հետևողական ոլորող մոմենտ ելք
Նվազեցրեց մեկուսացման ծերացումը
Երկարաձգված կրող կյանքը
Սա ուղղակիորեն աջակցում է արտադրության ժամանակի և պահպանման ծախսերի կրճատմանը.
Փաթաթման մեքենաների աստիճանային շարժիչները մեկուսացված չեն գործում: Դրանք մի մասն են համակարգված շարժման էկոհամակարգի .
OEM և ODM օպտիմիզացումը ներառում է.
Վարորդի համապատասխանությունը լարման և հոսանքի կորերի համար
Հակառեզոնանսային թյունինգ
Կոդավորիչի լուծման զուգավորում
PLC և շարժման վերահսկիչի ինտեգրում
Սինքրոնացում սերվո և փոխակրիչ համակարգերի հետ
Լավ ինտեգրված շարժիչները մատուցում են.
Ավելի հարթ արագացում
Ավելի արագ ցիկլի ժամանակներ
Նվազեցված թրթռումների փոխանցում
Բարելավված արտադրանքի հետևողականությունը
Համակարգի մակարդակի օպտիմիզացումը առավելագույնի է հասցնում իրական օգտագործման ոլորող մոմենտը և ճշգրտությունը , այլ ոչ միայն դրա գնահատված արժեքները: շարժիչի
Հավելվածներին հատուկ օպտիմիզացումը գերազանցում է կատարողականությունը՝ ներառելով ծառայության ժամկետի ճարտարագիտությունը.
OEM և ODM ստեպպեր շարժիչները փաթաթման մեքենաների համար հաճախ նախագծված են հետևյալով.
Չափազանց մեծ առանցքակալներ
Ամրացված լիսեռ մետալուրգիա
Խոնավության դիմացկուն մեկուսացում
Երկարատև քսում
Մոդուլային փոխարինող ճարտարապետություններ
Այս հատկանիշները նվազեցնում են.
Չնախատեսված պարապուրդ
Բաղադրիչի հոգնածության ձախողում
Ջերմային դեգրադացիա
Պահեստամասերի բարդությունը
ապահովում Կրկնվող, բարձր ցիկլի արդյունաբերական բեռների ներքո կայուն երկարաժամկետ շահագործման .
Փաթաթման մեքենաների համար քայլային շարժիչների օպտիմիզացումը մեխատրոնիկ ինժեներական կարգ է , որը միավորում է ոլորող մոմենտ ստեղծելը, շարժման պրոֆիլավորումը, ջերմային կառավարումը, կառուցվածքային հարմարեցումը և կառավարման ինտեգրումը:
Երբ կիրառական հատուկ օպտիմիզացումը ճիշտ է կատարվում, քայլային շարժիչները մատուցում են.
Ֆիլմի ճշգրիտ մշակում
Միատեսակ կնքման ճնշում
Կտրման ճշգրիտ գրանցում
Կայուն ինդեքսավորման շարժում
Շարունակական բարձր արագությամբ արտադրության հուսալիություն
OEM և ODM ստեպպեր շարժիչները, որոնք նախագծված են հատուկ փաթաթման մեքենաների համար, դառնում են հիմնական արտադրողականության բաղադրիչներ ՝ փոխակերպելով փաթեթավորման սարքավորումները բարձր ճշգրտության, բարձր թողունակության արդյունաբերական համակարգերի, որոնք կառուցված են երկարաժամկետ գործառնական գերազանցության համար:
Արդյունաբերական ավտոմատացման մեջ OEM և ODM աստիճանային շարժիչների իրական արժեքը չափվում է ոչ միայն գնման գնով, այլ կյանքի ցիկլի արժեքով, գործառնական արդյունավետությամբ և երկարաժամկետ կայունությամբ : Արտադրական սարքավորումներում տեղակայված աստիճանային շարժիչները պետք է պահպանեն միլիոնավոր ցիկլեր, շարունակական ջերմային բեռնում, տատանվող մեխանիկական սթրես և զարգացող գործընթացի պահանջներ : Նախագծման փուլում ընդունված ինժեներական որոշումներն ուղղակիորեն որոշում են՝ արդյոք շարժման համակարգը դառնում է հուսալի արտադրողականության ակտիվ, թե պարբերական սպասարկման պարտավորություն:.
Այս բաժինը ուսումնասիրում է, թե ինչպես է կյանքի ցիկլի վրա հիմնված ճարտարագիտությունը փոխակերպում OEM և ODM քայլային շարժիչները բարձրարժեք, երկարաժամկետ արդյունաբերական լուծումների:.
Կյանքի ցիկլի արժեքը ներառում է բոլոր ծախսերը, որոնք կատարվել են շարժիչի շահագործման ժամկետի ընթացքում.
Ձեռքբերում և ինտեգրում
Էներգիայի սպառումը
Տեխնիկական սպասարկում և սպասարկում
Դադարեցում և կորցրած արտադրություն
Պահեստամասերի կառավարում
Կյանքի ավարտի փոխարինում
Բարձր տուրքի արդյունաբերական համակարգերում պարապուրդը և անարդյունավետությունը զգալիորեն գերազանցում են սկզբնական ապարատային ծախսերը : Հետևաբար, OEM և ODM շարժիչների ճարտարագիտությունը առաջնահերթություն է տալիս գործառնական շարունակականությանը, երկարակեցությանը և կանխատեսելի կատարմանը նվազագույն նախնական գնից:
Շարժիչները, որոնք ընտրվում են բացառապես ցուցանակի ոլորող մոմենտով, հաճախ հանգեցնում են.
Քրոնիկ գերտաքացում
Առանցքակալների վաղաժամ ձախողում
Կորած քայլի իրադարձություններ
Չափազանց թրթռում
Ջարդոնի դրույքաչափերի բարձրացում
Կյանքի ցիկլի վրա հիմնված նախագծերը կանխում են այս արդյունքները ամուր ջերմային լուսանցքների, ոլորող մոմենտների նվազեցման և կառուցվածքային ամրապնդման միջոցով.
Թեև քայլային շարժիչներն ավանդաբար կապված են ոլորող մոմենտների սպառման հետ, ժամանակակից OEM և ODM լուծումներն օգտագործում են առաջադեմ ընթացիկ կարգավորում և շարժման հարմարվողական ռազմավարություններ:.
Արդյունավետության օպտիմալացումը ներառում է.
Ցածր դիմադրության պղնձե ոլորուններ
Օպտիմիզացված մագնիսական սխեմաներ
Բարձր լարման, ցածր հոսանքի աշխատանք
Խելացի հոսանքի կրճատում պարապ վիճակում
Փակ օղակի բեռի հարմարվողական շարժիչի կառավարում
Այս ռազմավարությունները զգալիորեն նվազեցնում են.
Ջերմության առաջացում
Էլեկտրաէներգիայի մատակարարման բեռը
Սառեցման պահանջներ
Մեկուսացման դեգրադացիա
Հազարավոր աշխատանքային ժամերի ընթացքում բարելավված էլեկտրական արդյունավետությունը բերում է ավելի ցածր գործառնական ծախսեր, ավելի մեծ ջերմային կայունություն և երկարաձգված շարժիչի շահագործման ժամկետ:.
Ջերմաստիճանը քայլային շարժիչի կյանքի միակ ամենամեծ որոշիչն է: Փաթաթման ջերմաստիճանի յուրաքանչյուր կայուն բարձրացում արագացնում է.
Մեկուսացման ծերացում
Մագնիսների ապամագնիսացում
Առանցքակալների քսայուղի խզում
Չափային աղավաղում
OEM և ODM կյանքի ցիկլի ճարտարագիտությունը շեշտում է.
Շարունակական ոլորող մոմենտ իջեցում
Բարձրակարգ մեկուսացման համակարգեր
Օպտիմիզացված ստատորից շրջանակ ջերմային ուղիներ
Ընդլայնված ջերմային զանգված
Ընտրովի հաղորդիչ կամ հարկադիր օդային սառեցում
Շարժիչները, որոնք նախատեսված են առավելագույն ջերմային սահմաններից շատ ցածր աշխատելու համար, ապահովում են.
Կայուն ոլորող մոմենտ ելք
Կանխատեսելի էլեկտրական վարքագիծ
Ավելի երկար կրող ծառայության ժամկետ
Հետևողական դիրքավորման ճշգրտություն
Ջերմային կարգապահությունը ուղղակիորեն կապված է շարունակական աշխատանքային արդյունաբերական սարքավորումների բազմամյա հուսալիության հետ.
OEM մեքենաների աստիճանային շարժիչները դիմանում են ցիկլային բեռնմանը, թրթռմանը, հարվածային ուժերին և առանցքային սթրեսին : Մեխանիկական հոգնածությունը կյանքի ցիկլի ծախսերի լուռ շարժիչ ուժ է:
Երկարաժամկետ կայունությունը կախված է.
Առանցքակալների ընտրություն և նախաբեռնման ձևավորում
Լիսեռ մետալուրգիա և մակերեսային մշակում
Ռոտորի դինամիկ հավասարակշռություն
Բնակարանային կոշտություն
Մոնտաժման միջերեսի ճշգրտություն
OEM և ODM շարժիչները, որոնք մշակված են կյանքի ցիկլի արժեքի համար, հաճախ ներառում են.
Չափազանց մեծ արդյունաբերական առանցքակալներ
Ամրապնդված լիսեռի պրոֆիլներ
Օպտիմիզացված ռոտորի աջակցության երկրաչափություն
Բարելավված կնքման համակարգեր
Թրթռումակայուն հավաքման մեթոդներ
Այս հատկանիշները զգալիորեն երկարացնում են խափանումների միջև ընկած միջին ժամանակը , նվազեցնում են հավասարեցման դեգրադացիան և պահպանում շարժման ճշգրտությունը տարիների ընթացքում:
Կյանքի ցիկլի արդյունավետությունը ոչ միայն մեխանիկական է, այլ նաև հսկողության մակարդակի կայունություն.
Քանի որ շարժիչները ծերանում են, էլեկտրական դիմադրությունը փոխվում է, առանցքակալները թուլանում են, և մագնիսական բնութագրերը շեղվում են: OEM և ODM նմուշները հակազդում են այս ազդեցություններին հետևյալի միջոցով.
Փակ օղակի ստեպպեր ճարտարապետներ
Կոդավորիչի վրա հիմնված դիրքի ստուգում
Հարմարվողական ընթացիկ կարգավորում
Ինտեգրված անսարքության հայտնաբերում
Այս տեխնոլոգիաները պահպանում են.
Զրո քայլ կորստի կատարում
Հետևողական ոլորող մոմենտ մատակարարում
Կայուն շարժման պրոֆիլներ
Սխալների վաղ հայտնաբերում
Փոքր դեգրադացիաների կանխարգելում, որպեսզի չդառնան արտադրության համար կարևոր ձախողումներ.
Կյանքի ցիկլի արժեքը մեծապես ազդում է սպասարկման լոգիստիկայի վրա.
OEM և ODM քայլային շարժիչներ, որոնք օպտիմիզացված են սպասարկման առանձնահատկությունների համար.
Տեղադրման ստանդարտ չափսեր
Մոդուլային միակցիչ համակարգեր
Փոխարինելի մալուխային հավաքույթներ
Կանխատեսելի մաշվածության պրոֆիլներ
Պահեստամասերի պարզեցված գուլպաներ
Դիզայնի նման որոշումները նվազեցնում են.
Պահպանման ժամանակը
Տեխնիկական հմտությունների խոչընդոտներ
Գույքագրման բարդությունը
Վերանորոգման միջին տևողությունը
Արդյունավետ սպասարկման ճարտարապետությունը ապահովում է անսարքություններից արագ վերականգնում՝ արտադրության նվազագույն խափանումներով.
Շարժիչի երկարատև կայունությունը ուղղակիորեն ազդում է արտադրանքի հետևողականության վրա.
Ստորացուցիչ շարժման համակարգերը առաջացնում են.
Ֆիլմի անհամապատասխան սնուցում
Փոփոխական կնքման ճնշում
Սխալ կտրվածքներ
Գրանցման շեղում
Ավելացել է գրությունը և վերամշակումը
OEM և ODM շարժիչները, որոնք մշակված են կյանքի ցիկլի կայունության համար, ապահովում են.
Կայուն կրկնելիություն
Մշտական ոլորող մոմենտ արձագանք
Հանգիստ ցածր արագությամբ շարժում
Նվազեցված թրթռումների փոխանցում
Այս գործոնները պաշտպանում են արտադրանքի որակը, գործընթացի կրկնելիությունը և ապրանքանիշի հուսալիությունը.
Կյանքի ցիկլի համար օպտիմիզացված քայլային շարժիչները նվազագույնի են հասցնում սեփականության ընդհանուր արժեքը հետևյալով.
Էներգիայի վատնման նվազեցում
Սպասարկման ընդմիջումների երկարացում
Չպլանավորված պարապուրդի կանխարգելում
Մեքենայի ճշգրտության պաշտպանություն
Աջակցում է շարունակական բարելավման բարելավմանը
Թեև շարժիչի սկզբնական ներդրումը կարող է փոքր-ինչ ավելի բարձր լինել, երկարաժամկետ արդյունքը հետևյալն է.
Ավելի ցածր կուտակային գործառնական ծախսեր
Սարքավորումների ավելի բարձր հասանելիություն
Կանխատեսելի բյուջետավորում
Ավտոմատացման ներդրումների բարելավված վերադարձ
Կյանքի ցիկլի արժեքը, արդյունավետությունը և երկարաժամկետ կայունությունը երկրորդական առավելություններ չեն. դրանք նախագծման հիմնական նպատակներն են պրոֆեսիոնալ OEM և ODM ստեպպեր շարժիչների ճարտարագիտության մեջ:
Երբ շարժիչները նախագծված են կյանքի ցիկլի արժեքի համար, նրանք ապահովում են.
Ջերմային առաձգականություն
Մեխանիկական դիմացկունություն
Վերահսկել հուսալիությունը
Էներգաարդյունավետություն
Կայուն արտադրության կատարում
OEM և ODM ստեպպեր շարժիչները, որոնք մշակվել են կյանքի ցիկլի մտածելակերպով, դառնում են ռազմավարական արդյունաբերական ակտիվներ , որոնք ապահովում են շարունակական աշխատանքը, արտադրանքի կայուն որակը և երկարաժամկետ շահութաբերությունը սարքավորումների ողջ կյանքի ընթացքում:
Ճիշտ քայլային շարժիչը փաթաթման մեքենան հիմնական ավտոմատացման սարքից վերածում է արդյունաբերական արտադրության ճշգրիտ համակարգի : Միավորելով ճշգրիտ ոլորող մոմենտ ճարտարագիտությունը, ջերմային վերլուծությունը, շարժման պրոֆիլավորումը, շրջակա միջավայրի պաշտպանությունը և վերահսկման համատեղելիությունը ՝ մենք ապահովում ենք, որ յուրաքանչյուր փաթաթող մեքենայի առանցք ապահովում է հետևողական կատարում, բարձր թողունակություն և երկարաժամկետ մեխանիկական ամբողջականություն։.
Շարժիչի ճշգրիտ ընտրությունը կամընտիր չէ, այն փաթաթող մեքենայի գերազանցության հիմքն է.


































































